আমি একদিন কবি হবো, কিন্তু কোনদিন তোমার প্রতিভার সমান হতে পারবো না
ইতিমধ্যে, আমি আপনাকে বোনাস হিসাবে এবং সমস্ত অর্থনীতিবিদদের জন্য "POGDC/MPRBC ধারণার ইতিহাস এবং জন্ম" এর একটি অতিরিক্ত পর্ব দিচ্ছি।




----- আসল বার্তা -----
থেকে: সিপিআই
তারিখ: বুধবার, এপ্রিল 25, 2007 19:19
বিষয়: RE: Re: reciprocating পিস্টন ইঞ্জিনের আপনার উদ্ভাবন -
প্রতি: Remundo
প্রিয় স্যার,
আমি বুঝতে পারি যে ইভেন্টে যে চারটি পিস্টন নেই, আপনি
ট্রান্সমিশনে প্রয়োগ করা সমস্ত টর্ককে সমর্থন করে
একটি একক মোটর খাদ।
আপনার শেষ বাক্য সম্পর্কে, আমি স্পষ্ট করতে চাই যে a
যান্ত্রিকভাবে সন্তোষজনক নয় এমন সমাধান খুব কমই হয়
আইনগতভাবে সন্তোষজনক, কারণ পেটেন্ট একটি রিজার্ভ করে
অপারেটিং একচেটিয়া তবে টেকনিক্যালি হলে সমাধান হয় না
ভাল না, খুব কমই কেউ এটি বাস্তবায়ন করতে চায়, এবং
তাই প্রায় কেউ করতে নিষেধের স্বার্থ
অগত্যা হ্রাস খুঁজে.
কিন্তু, আপনার উদ্ভাবন এই সমাধান কমাতে হবে না. আমরা
শুধু ব্যাখ্যা করতে হবে কিভাবে আপনার উদ্ভাবন হতে পারে
পিস্টনের সংখ্যা 4 থেকে ভিন্ন হলে ব্যবহৃত হয়।
মেইলার্স সালাম,

রিমন্ডো লিখেছেন:27 Avril 2007
হ্যালো জনাব সিপিআই,
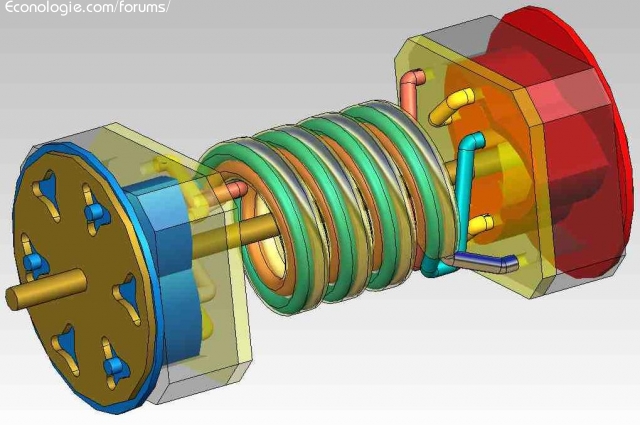
আমি পিস্টনের পারস্পরিক ঘূর্ণনকে যেকোন ইঞ্জিনের জন্য ক্রমাগত ঘূর্ণন গতিতে রূপান্তর করার একটি সাধারণ উপায় খুঁজে পেয়েছি p ঘূর্ণায়মান পিস্টন জোড়া।
এর অর্থ যান্ত্রিকভাবে নির্ভরযোগ্য কারণ এতে শুধুমাত্র ক্যাম/রোলার পরিচিতি জড়িত, যা সবচেয়ে শক্তিশালী প্রক্রিয়াগুলির মধ্যে রয়েছে।
আমি আপনাকে সপ্তাহান্তে জিআইএফ ফর্ম্যাটে অ্যানিমেশন পাঠাব যা তৈরি করার জন্য আমার এখনও সময় নেই ...
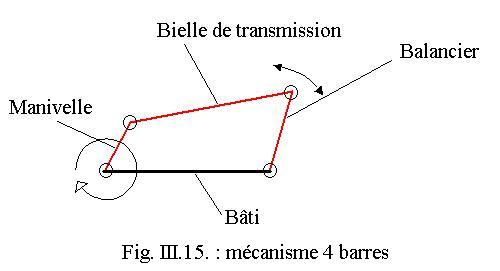
এই প্রক্রিয়াগুলি একটি 4 বার সিস্টেমের তুলনায় অনেক বেশি দক্ষ এবং পুরোপুরি ভারসাম্যপূর্ণ কারণ আমি আমার পদ্ধতিতে "উচ্চ প্রতিসাম্যের যান্ত্রিক পরিস্থিতি" আরোপ করেছি।
প্রস্তাবিত প্রক্রিয়াগুলি আপনার "পৃষ্ঠা 2 এর মাঝখানে উপস্থাপিত যুক্তি" এর সমস্ত অর্থ গ্রহণ করার অনুমতি দেয় এবং এইভাবে পেটেন্টের জন্য একটি দৃঢ় সংহতি এবং একটি বিস্তৃত সুযোগ প্রদান করে।
শুভেচ্ছা।








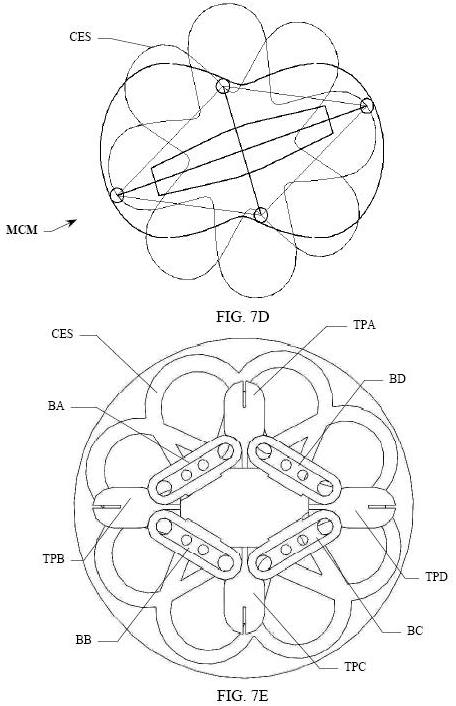 যেখানে ওভারল্যাপিং ওভারল্যাপিং ওভার মাল্টিলোবড পাথ সহ একটি প্লেট দিয়ে একটি হ্রাস গিয়ারের সমতুল্য পাওয়া যায়।
যেখানে ওভারল্যাপিং ওভারল্যাপিং ওভার মাল্টিলোবড পাথ সহ একটি প্লেট দিয়ে একটি হ্রাস গিয়ারের সমতুল্য পাওয়া যায়।



রিমন্ডো লিখেছেন:শিল্পের বর্তমান অবস্থা
এখন পর্যন্ত, গবেষণা এবং সাফল্যগুলি মূলত চতুর্ভুজীয় মেশিনগুলিতে (4 স্পষ্ট অংশযুক্ত) ফোকাস করে, প্রায়শই নন-ঘোরানো সমান্তরালোগ্রোল বা বিকৃত ঘূর্ণনশীল রম্বস টাইপের।
সুতরাং, কেউ আবিষ্কারের ক্ষেত্রের আদর্শ উদাহরণ হিসাবে ধরে রাখতে পারেন:
- রুমেন অ্যান্টোনভের পেটেন্ট FR2651019 (নন-ঘোরানো বিকৃত সমান্তরাল)।
- বিশেষত এবং কালানুক্রমিক ক্রমে, ঘূর্ণনশীল রম্বস মেশিনগুলি (এমআরএলডি) উপর ধারণার সিরিজ:
o FR1386505A 1964 সালে গাই লরেনসিনকে জারি করা হয়েছিল
o FR1376285A 1964 সালে পিয়ের ম্যাগনেটকে জারি করা হয়েছিল
o DE1551118A1 1967 সালে আলফ্রেড জর্ডান দ্বারা অনুরোধ করা
o FR2235268A1 স্পেনের 1973 সালে Ignacio মার্টিন আর্টাজো দ্বারা অনুরোধ করা
o FR2493397A1 1980 সালে জিন-পিয়েরে এমবার্ট দ্বারা অনুরোধ করা হয়েছিল
o DE19901110 A1 2000 সালে হারবার্ট হিটলিনকে জারি করা হয়েছিল
o সেন্ট হিলারি পরিবার (ক্যুবেক), বিশেষত মার্কিন যুক্তরাষ্ট্রে 6,164,263 এবং 6,899,075, বি 2 এর পেটেন্টগুলির ক্যাসিটুরবাইন সিরিজ



ফিরে "বিশেষ ইঞ্জিন, পেটেন্ট, জ্বালানী অর্থনীতি"
এই ব্রাউজিং ব্যবহারকারীরা forum : কোন নিবন্ধিত ব্যবহারকারী এবং 202 গেস্ট সিস্টেম